Aerofoil, a simple geometric shape that is responsible for heavier than air flight and energy generation from of wind, hydraulic and steam turbines. However, much mystery and confusion exists about how the aerofoil works. Here an explanation is presented about the working of an aerofoil by using computational fluid dynamics and without using any equations.
The fluid bends and tends to follow the shape of an object placed in its path when the fluid flows around the said object such as an aerofoil. This phenomenon happens due to the Coanda effect. Fig. 1 shows streamlines around an aerofoil at a Mach number of 0.22 and Reynolds number of 5e6. It can be seen from Fig.1 that the fluid starts to bend as soon as it reaches the leading edge of the aerofoil and the fluid follows the shape of the aerofoil.

Fig. 1, The white arrows represent the direction of fluid flow.
It is well understood that, as a moving fluid bends (changes direction), a pressure difference is created across the flow path. To understand this better, consider a tornado or a typhoon (not the aircrafts). In a tornado, the fluid revolves around a central axis. Consider a point at the center of the tornado. As this point moves towards the circumference of the tornado i.e. away from the center, the pressure increases and vice-versa. This happens due to the curvature of the streamlines inside a tornado. The more the curvature difference, the more the pressure difference across the streamlines.
In the case of symmetric aerofoils (which have top and bottom half at the same shape), there is no lift generated because the curvature of the streamlines is same on both the suction (top) and pressure (bottom) sides of the aerofoil. The resulting pressure difference between the suction and the pressure sides is zero. This can be seen in the negative coefficient of pressure (-Cp) plot shown in Fig. 2. The coefficient of pressures can be seen to overlap. This plot and subsequent figures and plots are generated using the data obtained from the computational fluid dynamics analysis of the aerofoil. Fig. 3 shows pressure distribution around the aerofoil. It is quite clear that the pressures at the top and bottom surface of the aerofoil are same, hence no lift generation. It is also evident that a pressure difference exists between leading and trailing edge of the aerofoil, hence the presence of the drag force (pressure drag) even at no angle of attack.

Fig. 2, Along the horizontal axis, 0 refers to leading edge.

Fig. 3, Air flow is from left to right.
But, if the same aerofoil is placed at an angle to the flow, the curvature of the streamlines change, as visible in Fig. 4. Due to the different curvature on the suction and pressure side of the aerofoil, a pressure gradient in created between the suction and pressure side of the aerofoil with lower pressure at the top and higher pressure at the bottom, as shown in Figs. 5. The -Cp plots for the aerofoil at the angle of attack is shown in Fig. 5. The pressure difference is quite clear in both Figs. 5-6.


Fig. 4, The white arrows represent direction of fluid flow.

Fig. 5, Along the horizontal axis, 0 refers to leading edge.

Fig. 6, Air flow is from left to right.


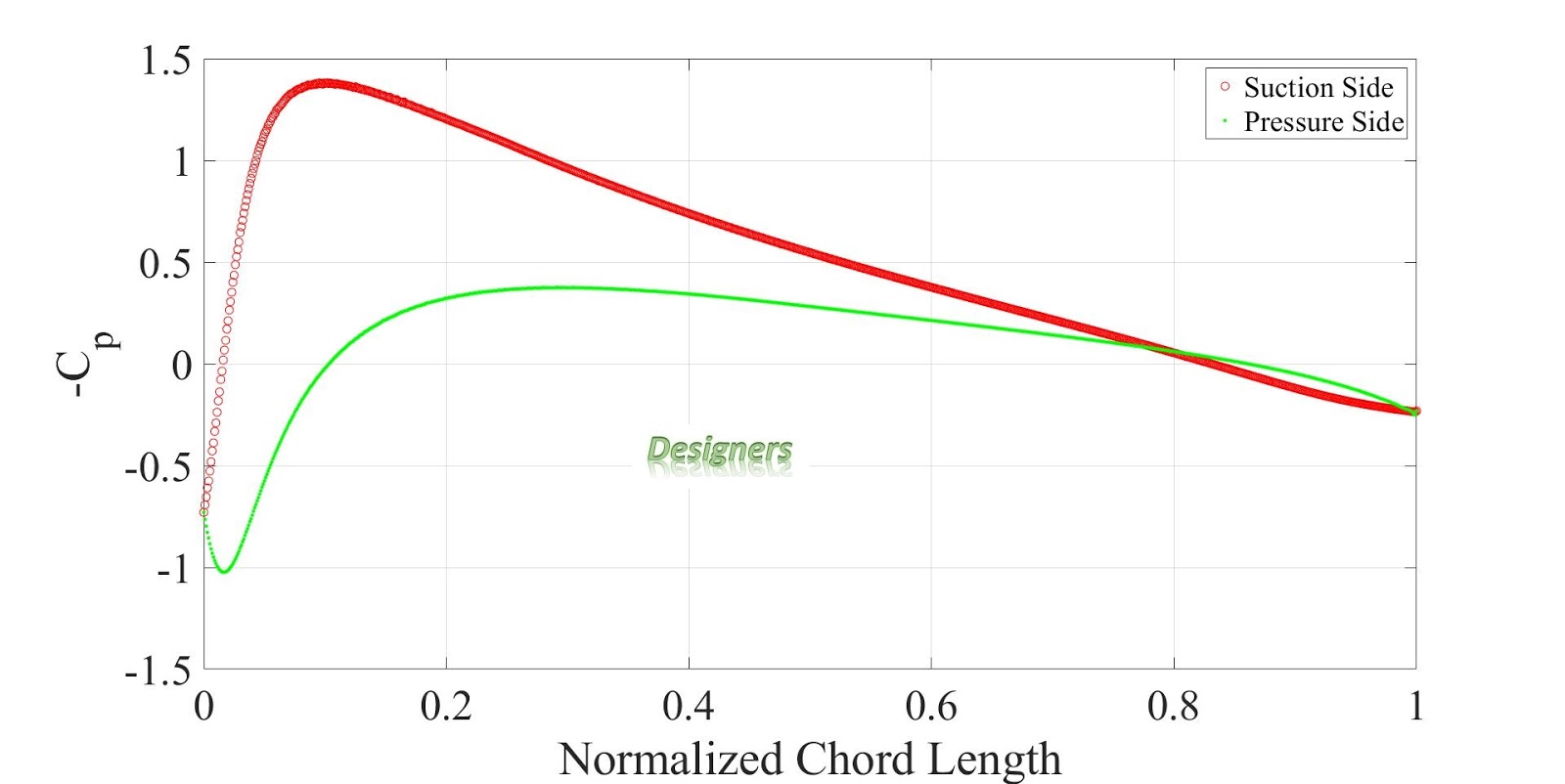
Fig. 5, Along the horizontal axis, 0 refers to leading edge.

Fig. 6, Air flow is from left to right.
In the far field, the pressure is uniform, colored by green in Figs. 3, 6. In a case when the fluid is turning, the pressure increases as away from the center of the curvature and vice versa. Looking at the suction side, the pressure will decrease as distance to the center increases. The pressure gradient at the bottom can be explained by the same reason. This difference in pressure is what causes the lift force, as evident from Fig. 5.
Velocity distribution around the aerofoil at an angle of attack is shown in Fig. 7. It can be seen that the fluid has more velocity at the suction side of the aerofoil as compared to the pressure side. The velocity distribution on the aerofoil without an angle of attack is same on both the pressure and suction sides of the aerofoil and is shown in Fig. 8.

Fig. 7, Air flow is from left to right.

Fig. 8, Air flow is from left to right.
This again, can be explained by the pressure gradient. It can be seen from Figs. 5-6 that the pressure gradient at the suction side of the aerofoil is much more favorable as compared to the pressure side. It can be seen from Figs. 5-6 that the pressure is highest at the leading edge of the aerofoil (stagnation point). The pressure falls to its lowest magnitude past the leading edge of the aerofoil on the suction side. Meanwhile, on the pressure side, the pressure drop is less severe as compared to the suction side. As a result, the fluid faces less resistance on suction side of the aerofoil in comparison with the pressure side. This is the reason why fluid velocity is more at the top as compared to the bottom of the aerofoil, not vice versa. In all the figures, the color red means maximum magnitude and the color blue implies minimum magnitude.
If you want to collaborate on the research projects related to turbomachinery, aerodynamics, renewable energy, please reach out. Thank you very much for reading.




















